FoveaCam++: Systems-Level Advances for Long Range Multi-Object High-Resolution Tracking
Yuxuan Zhang and Sanjeev J. Koppal
Full Text (PDF) | Poster | IROS 2024

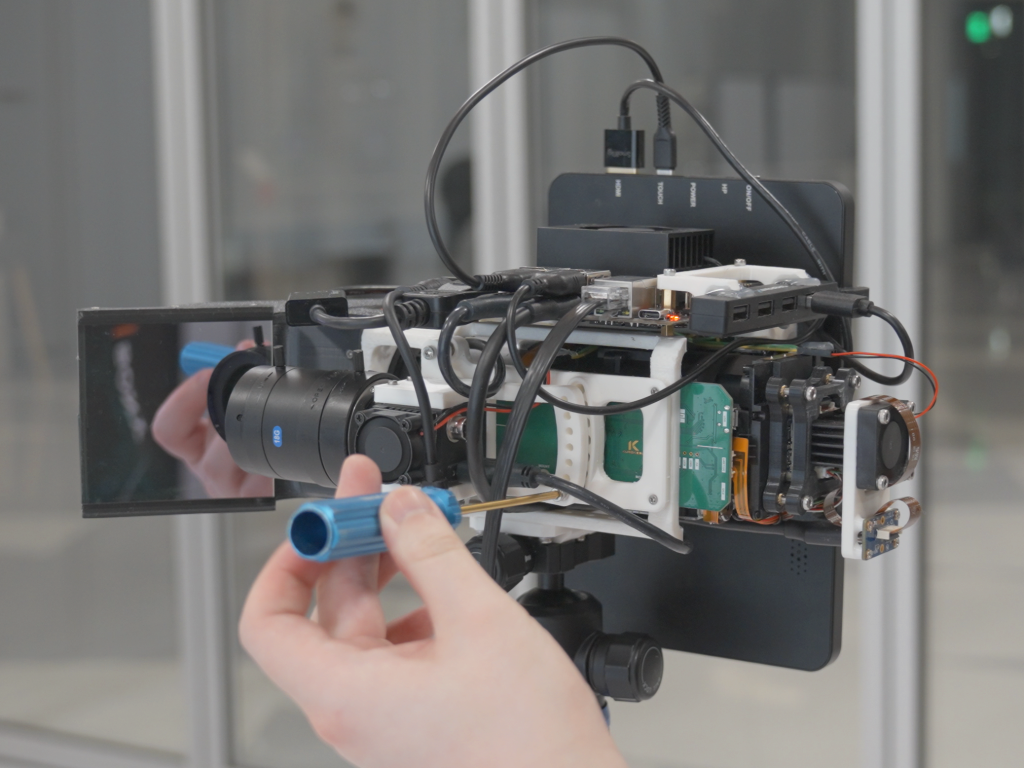
UAVs and other fast moving robots often need to keep track of distant objects. Conventional zoom cameras commit to a particular viewpoint, and carrying multiple zoom cameras for multi-object tracking is not feasible for power limited robotic systems. We present a dual camera setup that allows tracking of multiple targets at nearly 1km distance with high-resolution. Our setup includes a wide angle camera providing a conventional resolution view and a MEMS driven zoom camera that can query a specific region within the wide angle camera (WAC). We built and calibrated the two-camera system and implemented a real-time image fusion pipeline. We show multi-object tracking and stabilization in real world scenarios.
For privacy reasons YouTube needs your permission to be loaded.